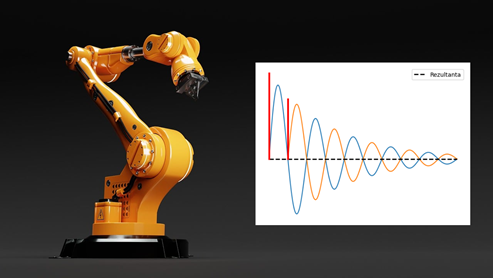
When using robotic manipulators, due to optimized mass properties, we often encounter reduced stiffness of the device, which leads to undesired oscillations during rapid movements, reducing accuracy. Within the scope of this task, it is necessary to review existing methods for damping oscillations of robotic manipulators, with a special emphasis on the input shaping method. A numerical implementation of the mentioned method on an arbitrary dynamic system (1-2 DoF) is envisaged.
Example:
https://www.youtube.com/watch?v=yuxm859f2Uo
Contact:
Gregor Čepon