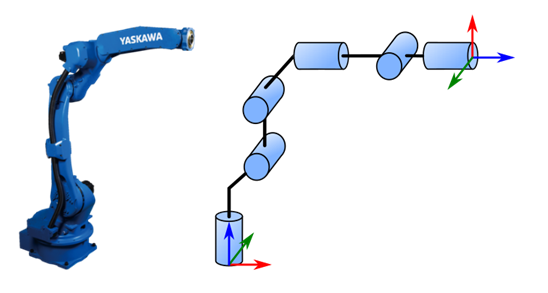
Within the scope of the task, it is necessary to explore methods for describing the kinematics of robotic manipulators. It is required to describe the theory of transformations between coordinate systems and various options for describing rotations. Special emphasis should be placed on the Denavit-Hartenberg formulation, which is the most widespread in the robotics industry. A numerical implementation of the kinematic model of a 6-axis manipulator is anticipated. Using the model, it is necessary to characterize the behavior of the manipulator in the vicinity of kinematic singularities.
Contact:
Gregor Čepon