Laboratory for Dynamics of Machines and Structures
Experimental validation of a complex, large-scale, rigid-body mechanism
M.Langerholc,
M.Česnik,
J. Slavič and
M.Boltežar
Engineering Structures, March 2012 vol. 36, Pages 220-227
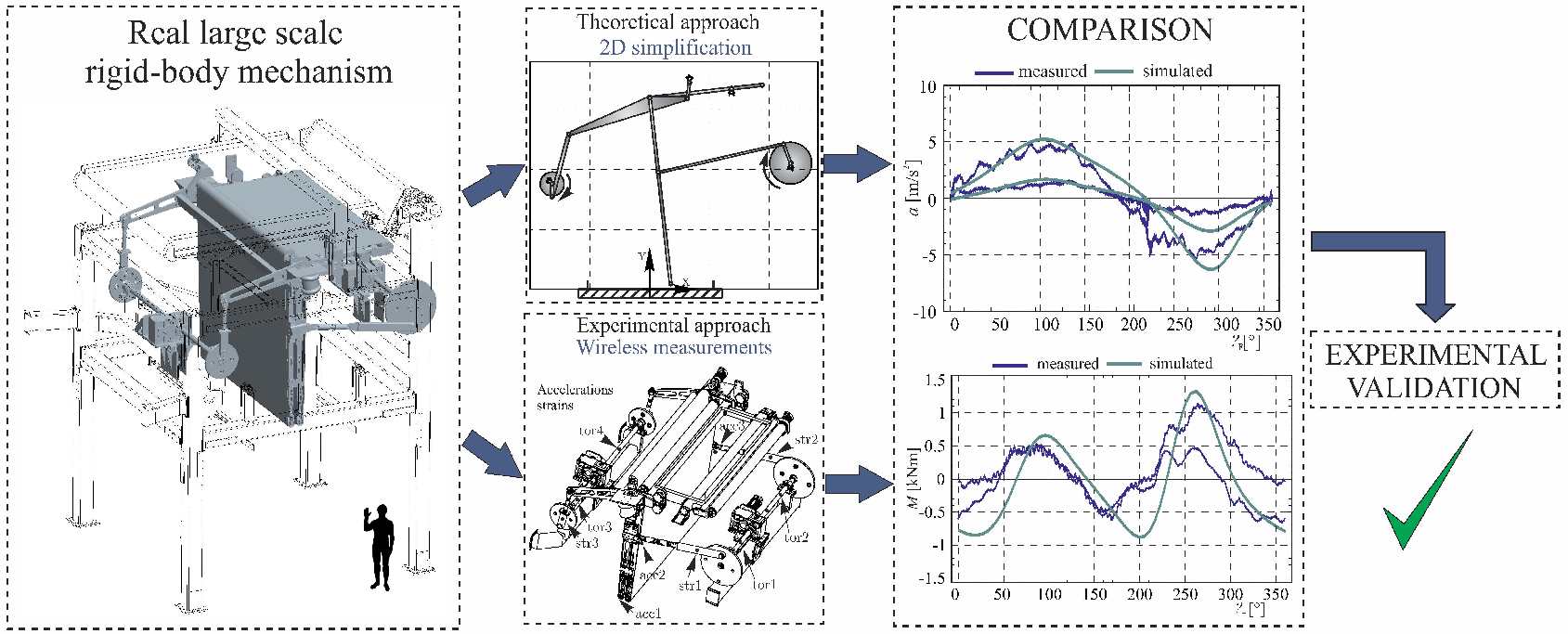
This study presents an approach to an experimental validation of a complex, large-scale, multi-body mechanism model with diverse body inertia and geometry properties, exposed to an arbitrary kinematic excitation. Such an approach was used to analyze and predict the dynamical behaviour of a complex, 24-DOF, pendulum system with a relatively large dimensions. To obtain the theoretical dynamical response a computational dynamics approach was used in order to establish a constraint-based, simplified, planar, rigid-body numerical model. To validate the model, a special experimental approach was employed that overcame the difficulties related to the analyzed system’s size, many rotating components and simultaneous measuring requirements. Consequently, a combination of conventional and wireless signal-streaming measuring setups, which transmitted the signal through the purposely set-up wireless network, were employed. The model is validated by comparing the simulated and experimentally obtained kinematical and dynamical quantities to justify rigidity of the model’s components and the simplified planar modeling. The validated model’s ability to predict hard-to-measure system’s response is demonstrated.
 download pdf
http://dx.doi.org/10.1016/j.engstruct.2011.12.014
download pdf
http://dx.doi.org/10.1016/j.engstruct.2011.12.014




