This work briefly presents the Pfeiffer-Glocker formulation for multibody dynamics of rigid bodies with unilateral contacts. The multiple concurrent contact situations of stick-slip, detachment and impact with friction are solved as linear complementarity problem. The theory is extended towards discretely defined bodies of complex body shapes with nonlinearities. As shown in the numerical example of electric-motor-brush dynamics the presented extensions can be used to simulate the influence of detailed geometry, including surface roughness. From more than 40 parameters which define the brush system the influences of brush-wear and brush-stiffness on the dynamic stability are presented.
~
See also related papers:
[On friction of the Graphite-Cooper Contact],
[Simulating Rough Contacts and Run-in]~
Software used:
[Multibody Dynamics Symulator]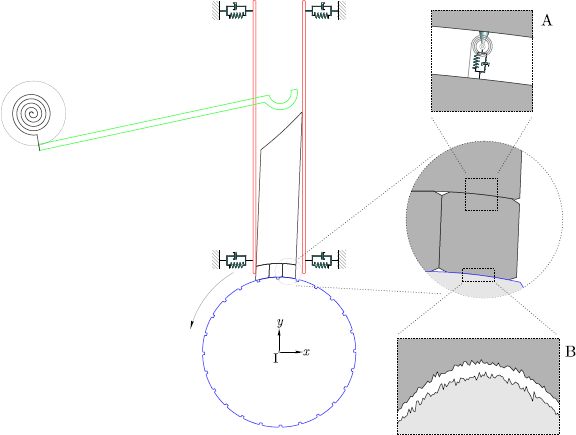
 download pdf
http://www.fs.uni-lj.si/sv/English/index.htm
download pdf
http://www.fs.uni-lj.si/sv/English/index.htm


