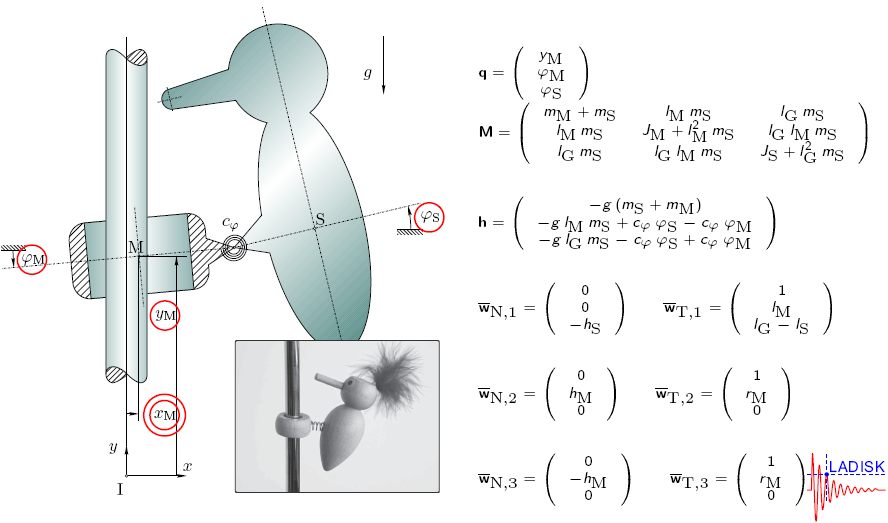
Non-linearity and non-smoothness in multi-body dynamics : application to woodpecker toy
J. Slavič and M. Boltežar
Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2006, vol 220, issue 3, 285-296
 download pdf
video
http://dx.doi.org/10.1243/095440605X31562
download pdf
video
http://dx.doi.org/10.1243/095440605X31562
J. Slavič and M. Boltežar
Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2006, vol 220, issue 3, 285-296


