Cilj predmeta je nadgradnja študija inženirske Newtonovske dinamike s prve stopnje z razširitvijo v Lagrangeovem, posplošenem smislu, ter razširitev osnovnih pojmov iz mehanskih nihanj na sisteme z več prostostnimi stopnjami. Kompetence:
Študent tako pridobi sistematična znanja za postavitev matematičnega modela gibajočega sistema z več prostostnimi stopnjami
Razumevanje odzivov nihajočih sistemov z več prostostnimi stopnjami pri lastnem ter vsiljenem nihanju
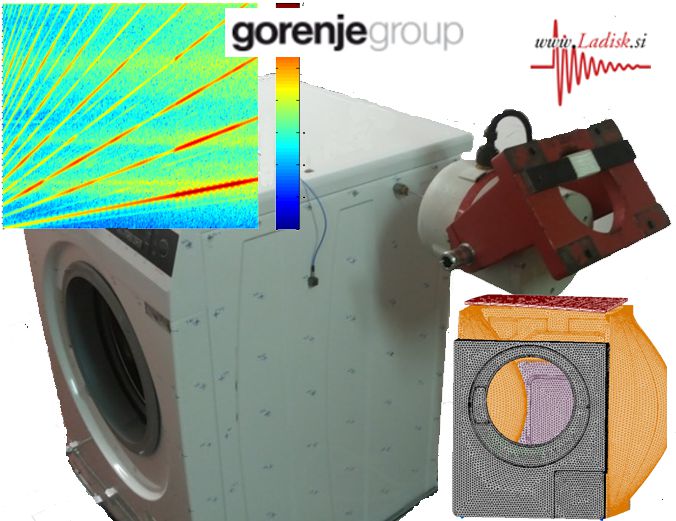
5 Structural dynamics based control of manufacturing process and end of line control.
LADISK, Faculty of Mech Eng, Univ of Ljubljana, (Confidential) 2017
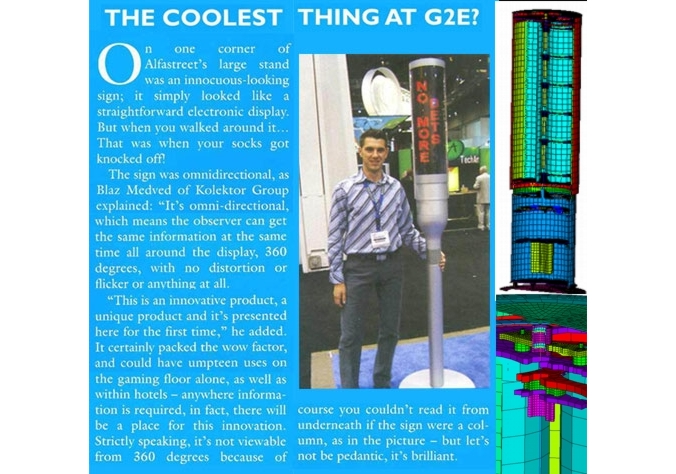
2 Parametric model of omnidirectional display device (Omni 450 prn, Omni 650 prn, Omni 1300 prn)
LADISK, Faculty of Mech Eng, Univ of Ljubljana, (Confidential) 2006

 GScholar
GScholar  jankoslavic
jankoslavic  jankoslavic
jankoslavic 
 CV
CV